外骨骼传感系统新突破!新国大苏研院李正国团队在《Nature》子刊发表科研成果
近日,新加坡国立大学苏州研究院(以下简称“新国大苏研院”)智慧医疗技术卓越研究中心高级研究员李正国团队在国际顶尖学术期刊《自然•通讯》(《Nature Communications》)上发表科研成果。李正国团队成功研发了一种基于摩擦式双向传感器的外骨骼传感系统,该传感系统实现了双向定量监测,极大改善了数据处理的复杂度,满足了人体运动追踪和人机交互控制对于低成本、低功耗的需求。
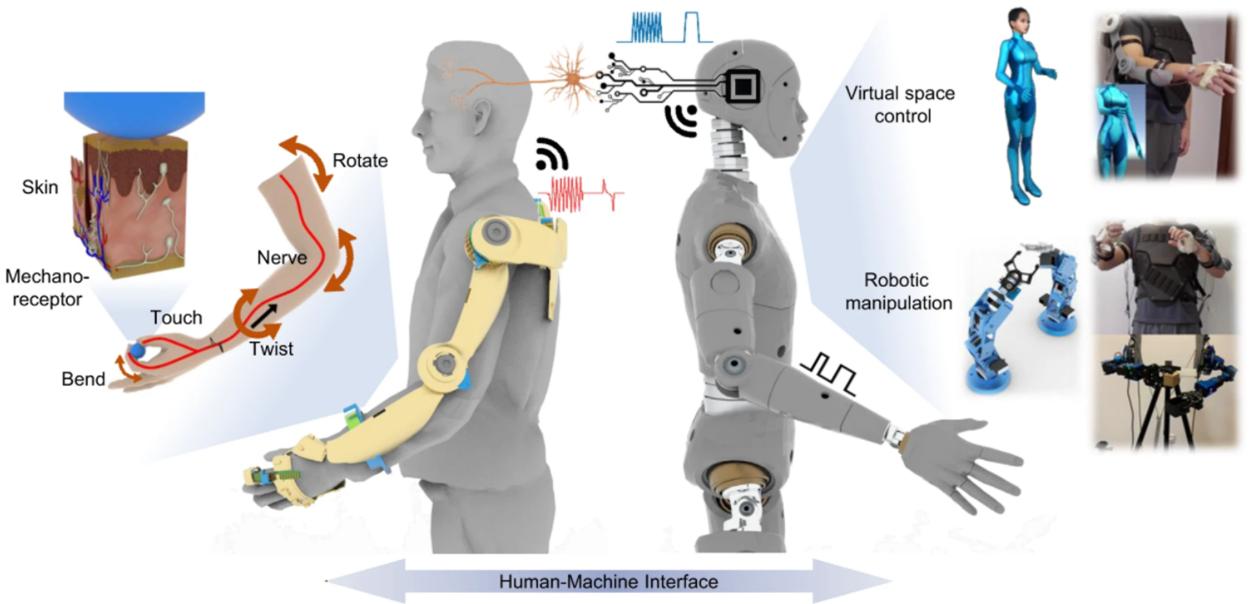
▲用于人机界面的外骨骼传感系统示意图
研究背景和研究思路
在5G和人工智能物联网的推动下,机器人和VR/AR技术的进步为我们的生活提供了更多便利和美好的体验,同时对实现有效的人机交互控制和先进的人机界面提出了更高要求。外骨骼机器人是一种新兴的人机融合技术,在康复和辅助手术方面具有独特优势,但常见的外骨骼传感系统进行多维人体运动的跟踪时通常需要巨额成本和复杂的数据处理。摩擦纳米发电机作为成本效益高、制作工艺简单的微纳能源,为克服这一关键技术问题提供了很好的思路。受此启发,李正国团队开展了基于摩擦纳米发电传感器的外骨骼传感系统的研发工作。
技术亮点
该传感系统采用一种具有高度通用性和兼容性的双稳态传感设计,实现了对线性位移、旋转、扭转、弯曲等运动的双向定量监测,解决了多维运动传感这一复杂过程的关键技术问题。传感器主要结构由负电性的栅格摩擦层、正电性的双向摆锤开关和对应的双电极组成,不同运动引起的栅格滑移可带动摆锤开关向对应电极偏转并接通传感信号通道,由栅格摩擦引起的脉冲电压信号即可转化为可定量的运动传感数据。通过针对肩关节、肘关节、腕关节以及指关节的定制化设计,并集成到3D打印的外骨骼系统,该传感单元可实现多自由度、多维度的双向运动传感。
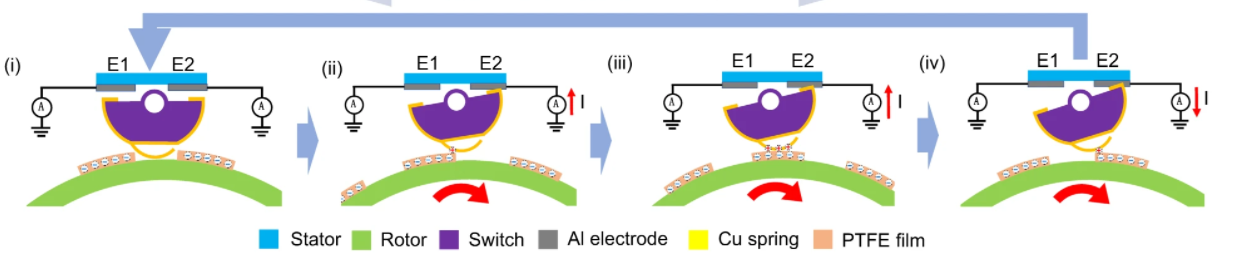
▲基于外骨骼运动的自供电传感系统的工作原理示意图
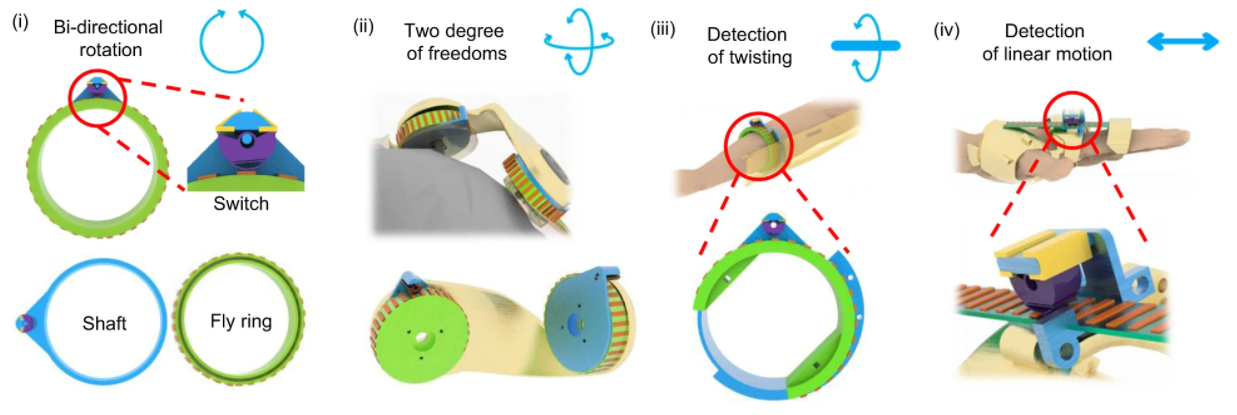
▲肩关节、肘关节、腕关节以及指关节的定制化设计,可以实现多自由度、多维度的双向运动传感

▲应用于诸如机器人协同操控、虚拟环境、人体动力学分析等多种人机交互场景
同时,基于外骨骼系统和人体结构的高度匹配特性,所采集的关节运动数据通过对应的人体动力学分析,还可以实现诸如拳速、力度等多种物理量的预测,进一步简化了对传感器种类的要求以及多物理量传感信号的复杂度,为实现低成本高效能的全身物理追踪以及人机交互控制带来了新的解决方案。
应用场景
该项成果模拟了上肢外骨骼机器人的应用场景,未来可为神经肌肉损伤及关节创伤患者提供既安全又多样化的康复运动训练,尤其对中风患者具有重大意义。在极端环境下,也有望通过远程操控外骨骼机器人来提供医疗服务。此外,该项技术也可应用于工业自动化、建模仿真等领域,助力物联网和人工智能领域的创新发展,从而赋能智慧城市的建设。
此前,李正国团队基于摩擦纳米发电机传感技术,还研发出可应用于智能建筑及家居的自动化、医疗保健、安防等方面的新型智能地板检测系统和面向未来无人工厂的智能软体机器手系统,研究成果均在期刊《自然•通讯》发表。
新国大苏研院的科研工作聚焦前沿技术,开展原创性、应用性研究,与产业发展强关联,与苏州工业园区及地方科技深融入,已建立环境与能源纳米科技、智慧医疗技术、大健康生物与食品工程等卓越研究中心。新国大苏研院致力于推动科技成果转化落地工作,希望通过研究产生有影响力的高科技创新产品,赋能地方产业升级。目前,研究院承担各项科研项目100余项,在国际著名期刊发表了近800篇有影响力的科研论文,其中2篇发表在Nature母刊,13篇发表在Nature子刊。


